|
osgEarth 2.1.1
|
|
osgEarth 2.1.1
|
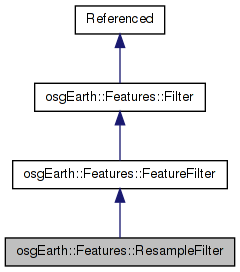
 Inheritance diagram for osgEarth::Features::ResampleFilter: Collaboration diagram for osgEarth::Features::ResampleFilter:
Inheritance diagram for osgEarth::Features::ResampleFilter: Collaboration diagram for osgEarth::Features::ResampleFilter:Public Types | |
| enum | ResampleMode { RESAMPLE_LINEAR, RESAMPLE_GREATCIRCLE, RESAMPLE_RHUMB } |
Public Member Functions | |
| ResampleFilter () | |
| ResampleFilter (double minLength, double maxLength) | |
| optional< double > & | minLength () |
| const optional< double > & | minLength () const |
| optional< double > & | maxLength () |
| const optional< double > & | maxLength () const |
| optional< double > & | perturbationThreshold () |
| const optional< double > & | perturbationThreshold () const |
| optional< ResampleMode > & | resampleMode () |
| const optional< ResampleMode > & | resampleMode () const |
| virtual FilterContext | push (FeatureList &input, FilterContext &context) |
Static Public Member Functions | |
| static bool | isSupported () |
Protected Member Functions | |
| bool | push (Feature *input, FilterContext &context) |
Protected Attributes | |
| optional< double > | _minLen |
| optional< double > | _maxLen |
| optional< double > | _perturbThresh |
| optional< ResampleMode > | _resampleMode |
This filter will resample line segments so they are between the min and max specified length.
Definition at line 36 of file ResampleFilter.
Definition at line 59 of file ResampleFilter.
| ResampleFilter::ResampleFilter | ( | ) |
Definition at line 36 of file ResampleFilter.cpp.
: _minLen( 0 ), _maxLen( DBL_MAX ), _perturbThresh( 0 ), _resampleMode(RESAMPLE_LINEAR) { //NOP }
| ResampleFilter::ResampleFilter | ( | double | minLength, |
| double | maxLength | ||
| ) |
Definition at line 45 of file ResampleFilter.cpp.
: _minLen( minLen ), _maxLen( maxLen ), _perturbThresh( 0 ), _resampleMode(RESAMPLE_LINEAR) { // NOP }
| bool ResampleFilter::isSupported | ( | ) | [static] |
Definition at line 31 of file ResampleFilter.cpp.
{
return true;
}
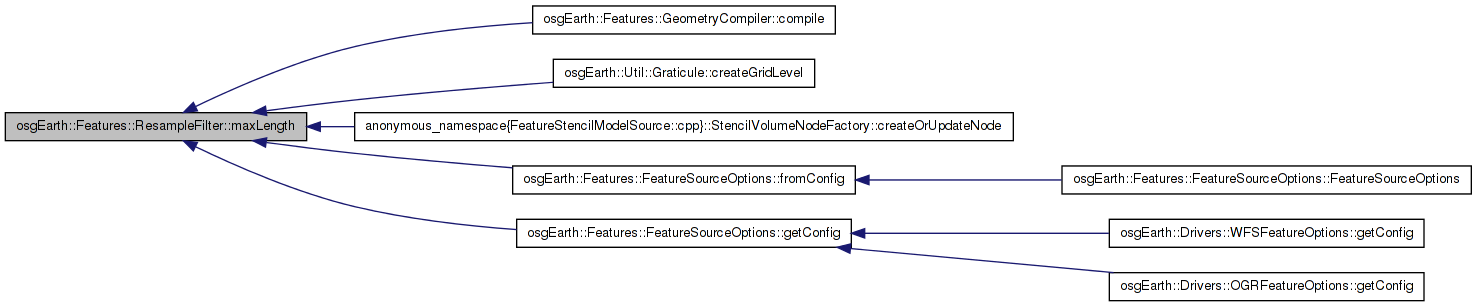
Here is the caller graph for this function:| optional<double>& osgEarth::Features::ResampleFilter::maxLength | ( | ) | [inline] |
Definition at line 51 of file ResampleFilter.
{ return _maxLen; }
Here is the caller graph for this function:| const optional<double>& osgEarth::Features::ResampleFilter::maxLength | ( | ) | const [inline] |
Definition at line 52 of file ResampleFilter.
{ return _maxLen; }
| optional<double>& osgEarth::Features::ResampleFilter::minLength | ( | ) | [inline] |
Definition at line 48 of file ResampleFilter.
{ return _minLen; }
Here is the caller graph for this function:| const optional<double>& osgEarth::Features::ResampleFilter::minLength | ( | ) | const [inline] |
Definition at line 49 of file ResampleFilter.
{ return _minLen; }
| const optional<double>& osgEarth::Features::ResampleFilter::perturbationThreshold | ( | ) | const [inline] |
Definition at line 55 of file ResampleFilter.
{ return _perturbThresh; }
| optional<double>& osgEarth::Features::ResampleFilter::perturbationThreshold | ( | ) | [inline] |
Definition at line 54 of file ResampleFilter.
{ return _perturbThresh; }
Here is the caller graph for this function:| bool ResampleFilter::push | ( | Feature * | input, |
| FilterContext & | context | ||
| ) | [protected] |
Definition at line 55 of file ResampleFilter.cpp.
{
if ( !input || !input->getGeometry() )
return true;
bool success = true;
GeometryIterator i( input->getGeometry() );
while( i.hasMore() )
{
Geometry* part = i.next();
if ( part->size() < 2 ) continue;
unsigned int origSize = part->size();
// copy the original part to a linked list. use a std::list since insert/erase
// will not invalidate iterators.
std::list<osg::Vec3d> plist;
plist.insert( plist.begin(), part->begin(), part->end() );
std::list<osg::Vec3d>::iterator v1 = plist.begin(); ++v1;
std::list<osg::Vec3d>::iterator v0 = plist.begin();
std::list<osg::Vec3d>::iterator last = plist.end(); --last;
while( v0 != last )
{
bool increment = true;
osg::Vec3d& p0 = *v0;
osg::Vec3d& p1 = *v1;
bool lastSeg = v1 == last;
osg::Vec3d seg = p1 - p0;
//OE_NOTICE << "p0=" << p0 << " to " << "p1=" << p1 << std::endl;
osg::Vec3d p0Rad, p1Rad;
if (_resampleMode.value() == RESAMPLE_GREATCIRCLE || _resampleMode.value() == RESAMPLE_RHUMB)
{
p0Rad = osg::Vec3d(osg::DegreesToRadians(p0.x()), osg::DegreesToRadians(p0.y()), p0.z());
p1Rad = osg::Vec3d(osg::DegreesToRadians(p1.x()), osg::DegreesToRadians(p1.y()), p1.z());
}
//Compute the length of the segment
double segLen = 0.0;
switch (_resampleMode.value())
{
case RESAMPLE_LINEAR:
segLen = seg.length();
break;
case RESAMPLE_GREATCIRCLE:
segLen = GeoMath::distance(p0Rad.y(), p0Rad.x(), p1Rad.y(), p1Rad.x());
break;
case RESAMPLE_RHUMB:
segLen = GeoMath::rhumbDistance(p0Rad.y(), p0Rad.x(), p1Rad.y(), p1Rad.x());
break;
}
if ( segLen < _minLen.value() && !lastSeg && plist.size() > 2 )
{
v1 = plist.erase( v1 );
increment = false;
}
else if ( segLen > _maxLen.value() )
{
//Compute the number of divisions to make
int numDivs = (1 + (int)(segLen/_maxLen.value()));
double newSegLen = segLen/(double)numDivs;
seg.normalize();
osg::Vec3d newPt;
double newHeight;
switch (_resampleMode.value())
{
case RESAMPLE_LINEAR:
{
newPt = p0 + seg * newSegLen;
}
break;
case RESAMPLE_GREATCIRCLE:
{
double bearing = GeoMath::bearing(p0Rad.y(), p0Rad.x(), p1Rad.y(), p1Rad.x());
double lat,lon;
GeoMath::destination(p0Rad.y(), p0Rad.x(), bearing, newSegLen, lat, lon);
newHeight = p0Rad.z() + ( p1Rad.z() - p0Rad.z() ) / (double)numDivs;
newPt = osg::Vec3d(osg::RadiansToDegrees(lon), osg::RadiansToDegrees(lat), newHeight);
}
break;
case RESAMPLE_RHUMB:
{
double bearing = GeoMath::rhumbBearing(p0Rad.y(), p0Rad.x(), p1Rad.y(), p1Rad.x());
double lat,lon;
GeoMath::rhumbDestination(p0Rad.y(), p0Rad.x(), bearing, newSegLen, lat, lon);
newHeight = p0Rad.z() + ( p1Rad.z() - p0Rad.z() ) / (double)numDivs;
newPt = osg::Vec3d(osg::RadiansToDegrees(lon), osg::RadiansToDegrees(lat), newHeight);
}
break;
}
if ( _perturbThresh.value() > 0.0 && _perturbThresh.value() < newSegLen )
{
float r = 0.5 - (float)::rand()/(float)RAND_MAX;
newPt.x() += r;
newPt.y() += r;
}
v1 = plist.insert( v1, newPt );
}
if ( increment ) { ++v0; ++v1; }
}
part->clear();
part->reserve( plist.size() );
part->insert( part->begin(), plist.begin(), plist.end() );
/*
if ( origSize != part->size() )
{
OE_NOTICE << "Resampled part from " << origSize << " to " << part->size() << " points" << std::endl;
}
*/
}
return success;
}
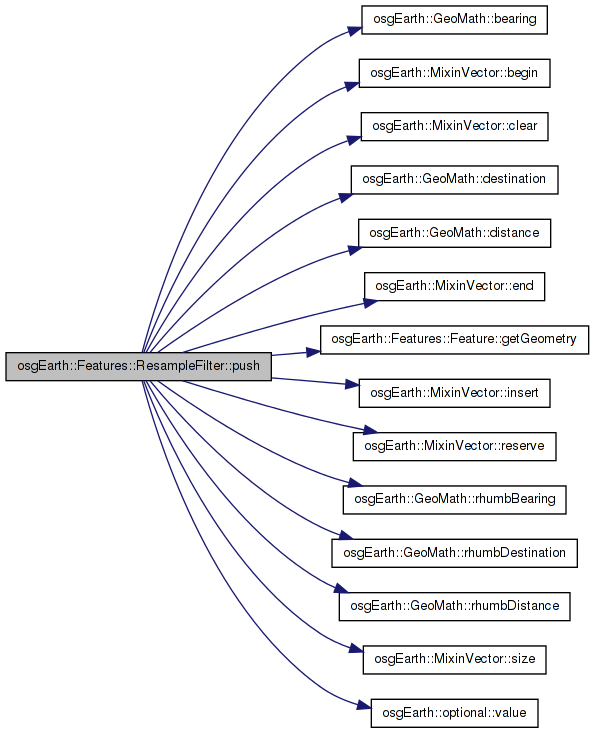
Here is the call graph for this function:| FilterContext ResampleFilter::push | ( | FeatureList & | input, |
| FilterContext & | context | ||
| ) | [virtual] |
Implements osgEarth::Features::FeatureFilter.
Definition at line 182 of file ResampleFilter.cpp.
{
if ( !isSupported() )
{
OE_WARN << "ResampleFilter support not enabled" << std::endl;
return context;
}
bool ok = true;
for( FeatureList::iterator i = input.begin(); i != input.end(); ++i )
if ( !push( i->get(), context ) )
ok = false;
return context;
}
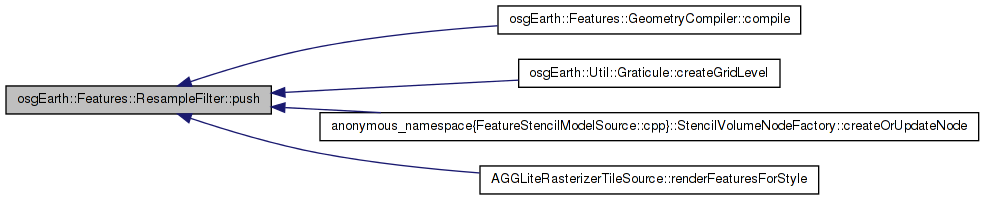
Here is the call graph for this function: Here is the caller graph for this function:| optional<ResampleMode>& osgEarth::Features::ResampleFilter::resampleMode | ( | ) | [inline] |
Definition at line 66 of file ResampleFilter.
{ return _resampleMode;}
Here is the caller graph for this function:| const optional<ResampleMode>& osgEarth::Features::ResampleFilter::resampleMode | ( | ) | const [inline] |
Definition at line 67 of file ResampleFilter.
{ return _resampleMode;}
optional<double> osgEarth::Features::ResampleFilter::_maxLen [protected] |
Definition at line 74 of file ResampleFilter.
optional<double> osgEarth::Features::ResampleFilter::_minLen [protected] |
Definition at line 74 of file ResampleFilter.
optional<double> osgEarth::Features::ResampleFilter::_perturbThresh [protected] |
Definition at line 74 of file ResampleFilter.
Definition at line 75 of file ResampleFilter.
 1.7.3
1.7.3