|
osgEarth 2.1.1
|
|
osgEarth 2.1.1
|
Functions | |
| double | smoothStepInterp (double t) |
| double | powFast (double x, double y) |
| double | accelerationInterp (double t, double a) |
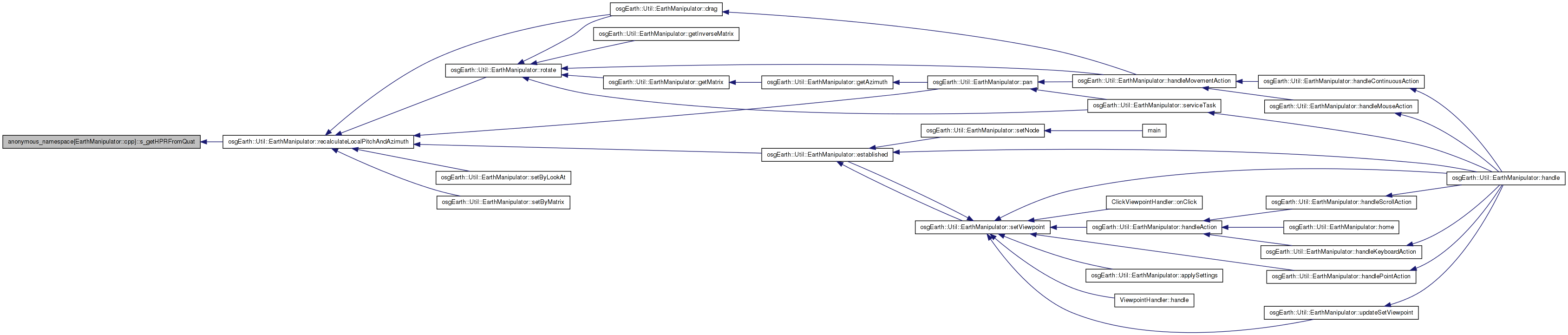
| void | s_getHPRFromQuat (const osg::Quat &q, double &h, double &p, double &r) |
| double anonymous_namespace{EarthManipulator.cpp}::accelerationInterp | ( | double | t, |
| double | a | ||
| ) |
Definition at line 54 of file EarthManipulator.cpp.
 Here is the call graph for this function: Here is the caller graph for this function:
Here is the call graph for this function: Here is the caller graph for this function:| double anonymous_namespace{EarthManipulator.cpp}::powFast | ( | double | x, |
| double | y | ||
| ) |
Definition at line 48 of file EarthManipulator.cpp.
{
return x/(x+y-y*x);
}
Here is the caller graph for this function:| void anonymous_namespace{EarthManipulator.cpp}::s_getHPRFromQuat | ( | const osg::Quat & | q, |
| double & | h, | ||
| double & | p, | ||
| double & | r | ||
| ) |
Definition at line 59 of file EarthManipulator.cpp.
{
#if 0
// http://www.euclideanspace.com/maths/geometry/rotations/conversions/quaternionToEuler/index.htm
p = atan2(2*(q.y()*q.z() + q.w()*q.x()), (q.w()*q.w() - q.x()*q.x() - q.y()*q.y() + q.z() * q.z()));
h = asin (2*q.x()*q.y() + 2*q.z()*q.w());
r = atan2(2*q.x()*q.w()-2*q.y()*q.z() , 1 - 2*q.x()*q.x() - 2*q.z()*q.z());
if( osg::equivalent( q.x()*q.y() + q.z() *q.w(), 0.5 ) )
{
p = (float)(2 * atan2( q.x(),q.w()));
r = 0;
}
else if( osg::equivalent( q.x()*q.y() + q.z()*q.w(), -0.5 ) )
{
p = (float)(-2 * atan2(q.x(), q.w()));
r = 0;
}
#else
osg::Matrixd rot(q);
p = asin(rot(1,2));
if( osg::equivalent(osg::absolute(p), osg::PI_2) )
{
r = 0.0;
h = atan2( rot(0,1), rot(0,0) );
}
else
{
r = atan2( rot(0,2), rot(2,2) );
h = atan2( rot(1,0), rot(1,1) );
}
#endif
}
Here is the call graph for this function: Here is the caller graph for this function:| double anonymous_namespace{EarthManipulator.cpp}::smoothStepInterp | ( | double | t | ) |
Definition at line 42 of file EarthManipulator.cpp.
{
return (t*t)*(3.0-2.0*t);
}
Here is the caller graph for this function: 1.7.3
1.7.3