|
osgEarth 2.1.1
|
|
osgEarth 2.1.1
|
Public Member Functions | |
| ObjectPlacer (osg::Node *terrain, int traversalMask=~0, bool clamp=false, int maxLevel=20) | |
| bool | createPlacerMatrix (double lat_degrees, double lon_degrees, double height, osg::Matrixd &out_result) const |
| osg::Node * | placeNode (osg::Node *node, double lat_degrees, double lon_degrees, double height) const |
Private Member Functions | |
| bool | clampGeocentric (osg::CoordinateSystemNode *csn, double lat_rad, double lon_rad, osg::Vec3d &out) const |
| bool | clampProjected (osg::CoordinateSystemNode *csn, double x, double y, osg::Vec3d &out) const |
Private Attributes | |
| osg::ref_ptr< osgEarth::MapNode > | _mapNode |
| osg::ref_ptr < osg::CoordinateSystemNode > | _csn |
| osg::ref_ptr < osgUtil::IntersectionVisitor::ReadCallback > | _readCallback |
| int | _traversalMask |
| bool | _clamp |
Convenience utilities for placing an object on an osgEarth terrain map using latitude/longitude coordinates.
Definition at line 34 of file ObjectPlacer.
| ObjectPlacer::ObjectPlacer | ( | osg::Node * | terrain, |
| int | traversalMask = ~0, |
||
| bool | clamp = false, |
||
| int | maxLevel = 20 |
||
| ) |
Constructs a new placer.
| terrain | The scene graph containing the osgEarth::Map node. |
| traversalMask | Mask to use when intersecting the terrain. |
| clamp | Whether the class should attempt to calculate the placement position so that it sits exactly on the terrain skin. Warning: this does not yet work properly for maps that don't report a maximum resolution (like most of the commercial providers). |
| maxLevel | Maximum level of detail to which to search for high resolution terrain. |
Definition at line 49 of file ObjectPlacer.cpp.
: _traversalMask( traversalMask ), _clamp( clamp ) { _mapNode = findTopMostNodeOfType<osgEarth::MapNode>( terrain ); _csn = findTopMostNodeOfType<osg::CoordinateSystemNode>( terrain ); _readCallback = new CachingReadCallback( maxLevel ); }
| bool ObjectPlacer::clampGeocentric | ( | osg::CoordinateSystemNode * | csn, |
| double | lat_rad, | ||
| double | lon_rad, | ||
| osg::Vec3d & | out | ||
| ) | const [private] |
Definition at line 59 of file ObjectPlacer.cpp.
{
osg::Vec3d start, end;
csn->getEllipsoidModel()->convertLatLongHeightToXYZ( lat_rad, lon_rad, 50000, start.x(), start.y(), start.z() );
csn->getEllipsoidModel()->convertLatLongHeightToXYZ( lat_rad, lon_rad, -50000, end.x(), end.y(), end.z() );
osgUtil::LineSegmentIntersector* i = new osgUtil::LineSegmentIntersector( start, end );
osgUtil::IntersectionVisitor iv;
iv.setIntersector( i );
static_cast<CachingReadCallback*>(_readCallback.get())->reset();
iv.setReadCallback( _readCallback.get() );
iv.setTraversalMask( _traversalMask );
_mapNode->accept( iv );
osgUtil::LineSegmentIntersector::Intersections& results = i->getIntersections();
if ( !results.empty() )
{
const osgUtil::LineSegmentIntersector::Intersection& result = *results.begin();
out = result.matrix.valid() ?
result.localIntersectionPoint * (*result.matrix) :
result.localIntersectionPoint;
return true;
}
return false;
}
 Here is the caller graph for this function:
Here is the caller graph for this function:| bool ObjectPlacer::clampProjected | ( | osg::CoordinateSystemNode * | csn, |
| double | x, | ||
| double | y, | ||
| osg::Vec3d & | out | ||
| ) | const [private] |
Definition at line 88 of file ObjectPlacer.cpp.
{
osg::Vec3d start( x, y, 50000 );
osg::Vec3d end(x, y, -50000);
osgUtil::LineSegmentIntersector* i = new osgUtil::LineSegmentIntersector( start, end );
osgUtil::IntersectionVisitor iv;
iv.setIntersector( i );
static_cast<CachingReadCallback*>(_readCallback.get())->reset();
iv.setReadCallback( _readCallback.get() );
iv.setTraversalMask( _traversalMask );
_mapNode->accept( iv );
osgUtil::LineSegmentIntersector::Intersections& results = i->getIntersections();
if ( !results.empty() )
{
const osgUtil::LineSegmentIntersector::Intersection& result = *results.begin();
out = result.matrix.valid() ?
result.localIntersectionPoint * (*result.matrix) :
result.localIntersectionPoint;
return true;
}
return false;
}
Here is the caller graph for this function:| bool ObjectPlacer::createPlacerMatrix | ( | double | lat_degrees, |
| double | lon_degrees, | ||
| double | height, | ||
| osg::Matrixd & | out_result | ||
| ) | const |
Creates a double-precision matrix that will transform geometry to the specified map location. In a geocentric map, the matrix will also rotate into the tangent plane.
| lat_degrees,lon_degrees | Location on the map for which to generate a matrix |
| height | Height above the terrain (in local units) |
| out_result | Receives the resulting matrix; only valid if the method returns TRUE. |
Definition at line 115 of file ObjectPlacer.cpp.
{
if ( !_mapNode.valid() || !_csn.valid() )
{
OE_WARN << "ObjectPlacer: terrain is missing either a Map or CSN node" << std::endl;
return false;
}
// see whether this is a geocentric model:
bool is_geocentric = _csn.valid() && _csn->getEllipsoidModel() != NULL;
const SpatialReference* srs = _mapNode->getMap()->getProfile()->getSRS();
// now build a matrix:
if ( is_geocentric )
{
double lat_rad = osg::DegreesToRadians( lat_deg );
double lon_rad = osg::DegreesToRadians( lon_deg );
if ( _clamp )
{
osg::Vec3d c;
if ( clampGeocentric( _csn.get(), lat_rad, lon_rad, c ) )
{
srs->getEllipsoid()->computeLocalToWorldTransformFromXYZ( c.x(), c.y(), c.z(), out_result );
}
}
else
{
srs->getEllipsoid()->computeLocalToWorldTransformFromLatLongHeight( lat_rad, lon_rad, height, out_result );
}
}
else // projected or "flat geographic"
{
osg::Vec3d local(0, 0, height);
// first convert the input coords to the map srs:
srs->getGeographicSRS()->transform2D( lon_deg, lat_deg, srs, local.x(), local.y());
if ( _clamp )
{
clampProjected( _csn.get(), local.x(), local.y(), local );
local.z() += height;
}
out_result = osg::Matrixd::translate( local );
}
return true;
}
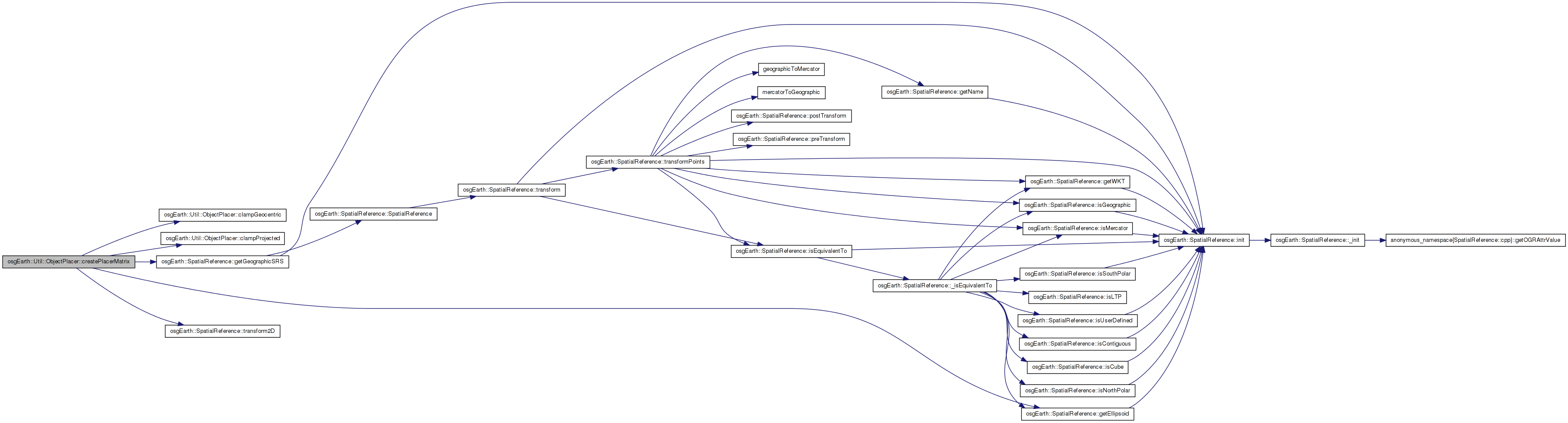
Here is the call graph for this function: Here is the caller graph for this function:| osg::Node * ObjectPlacer::placeNode | ( | osg::Node * | node, |
| double | lat_degrees, | ||
| double | lon_degrees, | ||
| double | height | ||
| ) | const |
Creates a new node graph that positions the input node at a specified map location. The resulting node will contain the input node as a child.
| node | Node to position at the specified location |
| lat_degrees,lon_degrees | Position on the map at which to place the node |
| height | Height above the terrain (in local units) |
Definition at line 166 of file ObjectPlacer.cpp.
{
osg::Node* result = NULL;
osg::Matrixd matrix;
if ( createPlacerMatrix( lat_deg, lon_deg, height, matrix ) )
{
osg::MatrixTransform* mt = new osg::MatrixTransform( matrix );
mt->addChild( node );
result = mt;
}
return result;
}
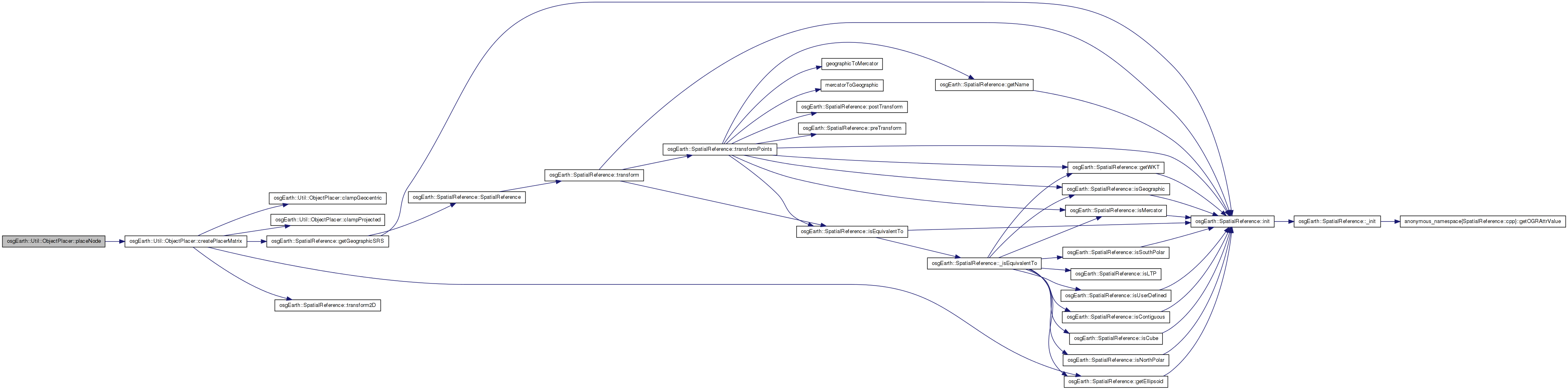
Here is the call graph for this function:bool osgEarth::Util::ObjectPlacer::_clamp [private] |
Definition at line 104 of file ObjectPlacer.
osg::ref_ptr<osg::CoordinateSystemNode> osgEarth::Util::ObjectPlacer::_csn [private] |
Definition at line 101 of file ObjectPlacer.
osg::ref_ptr<osgEarth::MapNode> osgEarth::Util::ObjectPlacer::_mapNode [private] |
Definition at line 100 of file ObjectPlacer.
osg::ref_ptr<osgUtil::IntersectionVisitor::ReadCallback> osgEarth::Util::ObjectPlacer::_readCallback [private] |
Definition at line 102 of file ObjectPlacer.
int osgEarth::Util::ObjectPlacer::_traversalMask [private] |
Definition at line 103 of file ObjectPlacer.
 1.7.3
1.7.3