|
osgEarth 2.1.1
|
|
osgEarth 2.1.1
|
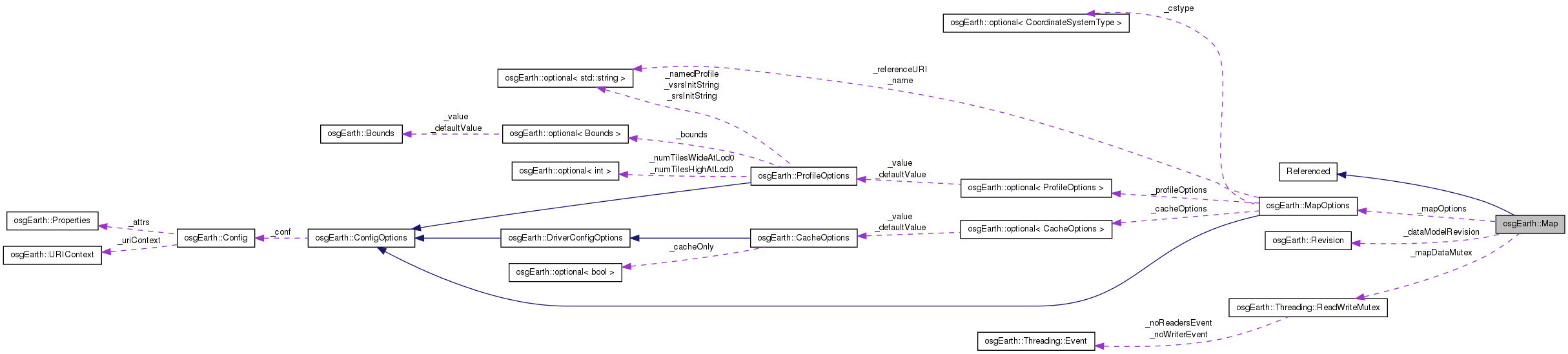
 Inheritance diagram for osgEarth::Map: Collaboration diagram for osgEarth::Map:
Inheritance diagram for osgEarth::Map: Collaboration diagram for osgEarth::Map:Public Types | |
| enum | ModelParts { IMAGE_LAYERS = 1 << 0, ELEVATION_LAYERS = 1 << 1, TERRAIN_LAYERS = IMAGE_LAYERS | ELEVATION_LAYERS, MODEL_LAYERS = 1 << 2, MASK_LAYERS = 1 << 3, MASKED_TERRAIN_LAYERS = TERRAIN_LAYERS | MASK_LAYERS, ENTIRE_MODEL = 0xff } |
Public Member Functions | |
| Map (const MapOptions &options=MapOptions()) | |
| const MapOptions & | getMapOptions () const |
| const Profile * | getProfile () const |
| int | getImageLayers (ImageLayerVector &out_layers, bool validLayersOnly=false) const |
| int | getNumImageLayers () const |
| ImageLayer * | getImageLayerByName (const std::string &name) const |
| ImageLayer * | getImageLayerByUID (UID layerUID) const |
| ImageLayer * | getImageLayerAt (int index) const |
| int | getElevationLayers (ElevationLayerVector &out_layers, bool validLayersOnly=false) const |
| int | getNumElevationLayers () const |
| ElevationLayer * | getElevationLayerByName (const std::string &name) const |
| ElevationLayer * | getElevationLayerByUID (UID layerUID) const |
| ElevationLayer * | getElevationLayerAt (int index) const |
| int | getModelLayers (ModelLayerVector &out_layers, bool validLayersOnly=false) const |
| int | getNumModelLayers () const |
| ModelLayer * | getModelLayerByName (const std::string &name) const |
| ModelLayer * | getModelLayerByUID (UID layerUID) const |
| ModelLayer * | getModelLayerAt (int index) const |
| int | getTerrainMaskLayers (MaskLayerVector &out_list) const |
| void | addMapCallback (MapCallback *callback) const |
| void | removeMapCallback (MapCallback *callback) |
| void | addImageLayer (ImageLayer *layer) |
| void | insertImageLayer (ImageLayer *layer, unsigned int index) |
| void | removeImageLayer (ImageLayer *layer) |
| void | moveImageLayer (ImageLayer *layer, unsigned int newIndex) |
| void | addElevationLayer (ElevationLayer *layer) |
| void | removeElevationLayer (ElevationLayer *layer) |
| void | moveElevationLayer (ElevationLayer *layer, unsigned int newIndex) |
| void | addModelLayer (ModelLayer *layer) |
| void | insertModelLayer (ModelLayer *layer, unsigned int index) |
| void | removeModelLayer (ModelLayer *layer) |
| void | moveModelLayer (ModelLayer *layer, unsigned int newIndex) |
| void | addTerrainMaskLayer (MaskLayer *layer) |
| void | removeTerrainMaskLayer (MaskLayer *layer) |
| const osgDB::ReaderWriter::Options * | getGlobalOptions () const |
| void | setGlobalOptions (const osgDB::ReaderWriter::Options *options) |
| void | setName (const std::string &name) |
| const std::string & | getName () const |
| bool | getHeightField (const TileKey &key, bool fallback, osg::ref_ptr< osg::HeightField > &out_hf, bool *out_isFallback=0L, ElevationInterpolation interpolation=INTERP_AVERAGE, ElevationSamplePolicy samplePolicy=SAMPLE_FIRST_VALID, ProgressCallback *progress=0) const |
| void | setCache (Cache *cache) |
| Cache * | getCache () const |
| Revision | getDataModelRevision () const |
| bool | isGeocentric () const |
| bool | toMapPoint (const osg::Vec3d &input, const SpatialReference *input_srs, osg::Vec3d &output) const |
| bool | mapPointToWorldPoint (const osg::Vec3d &input, osg::Vec3d &output) const |
| bool | worldPointToMapPoint (const osg::Vec3d &input, osg::Vec3d &output) const |
| bool | sync (class MapFrame &frame) const |
Protected Member Functions | |
| ~Map () | |
Private Member Functions | |
| void | calculateProfile () |
Private Attributes | |
| MapOptions | _mapOptions |
| std::string | _name |
| ImageLayerVector | _imageLayers |
| ElevationLayerVector | _elevationLayers |
| ModelLayerVector | _modelLayers |
| MaskLayerVector | _terrainMaskLayers |
| MapCallbackList | _mapCallbacks |
| osg::ref_ptr< const osgDB::ReaderWriter::Options > | _globalOptions |
| Threading::ReadWriteMutex | _mapDataMutex |
| osg::ref_ptr< const Profile > | _profile |
| osg::ref_ptr< Cache > | _cache |
| Revision | _dataModelRevision |
Map is the main data model that the MapNode will render. It is a container for all Layer objects (that contain the actual data) and the rendering options.
| IMAGE_LAYERS | |
| ELEVATION_LAYERS | |
| TERRAIN_LAYERS | |
| MODEL_LAYERS | |
| MASK_LAYERS | |
| MASKED_TERRAIN_LAYERS | |
| ENTIRE_MODEL |
Definition at line 374 of file Map.
{
IMAGE_LAYERS = 1 << 0,
ELEVATION_LAYERS = 1 << 1,
TERRAIN_LAYERS = IMAGE_LAYERS | ELEVATION_LAYERS,
MODEL_LAYERS = 1 << 2,
MASK_LAYERS = 1 << 3,
MASKED_TERRAIN_LAYERS = TERRAIN_LAYERS | MASK_LAYERS,
ENTIRE_MODEL = 0xff
};
| Map::Map | ( | const MapOptions & | options = MapOptions() | ) |
Constructs a new, empty map.
Definition at line 64 of file Map.cpp.
: osg::Referenced( true ), _mapOptions( options ), _dataModelRevision(0) { //NOP }
| void Map::addElevationLayer | ( | ElevationLayer * | layer | ) |
Adds an elevation layer to the map.
Definition at line 428 of file Map.cpp.
{
osgEarth::Registry::instance()->clearBlacklist();
unsigned int index = -1;
if ( layer )
{
//Set options for the map from the layer
layer->setReferenceURI( _mapOptions.referenceURI().value() );
//propagate the cache to the layer:
if ( _mapOptions.cache().isSet() && _mapOptions.cache()->cacheOnly().isSetTo( true ) )
{
layer->setCacheOnly( true );
}
//Set the Cache for the MapLayer to our cache.
layer->setCache( this->getCache() );
// Tell the layer the map profile, if possible:
if ( _profile.valid() )
layer->setTargetProfileHint( _profile.get() );
int newRevision;
// Add the layer to our stack.
{
Threading::ScopedWriteLock lock( _mapDataMutex );
_elevationLayers.push_back( layer );
index = _elevationLayers.size() - 1;
newRevision = ++_dataModelRevision;
}
// a separate block b/c we don't need the mutex
for( MapCallbackList::iterator i = _mapCallbacks.begin(); i != _mapCallbacks.end(); i++ )
{
i->get()->onMapModelChanged( MapModelChange(
MapModelChange::ADD_ELEVATION_LAYER, newRevision, layer, index) );
}
}
}
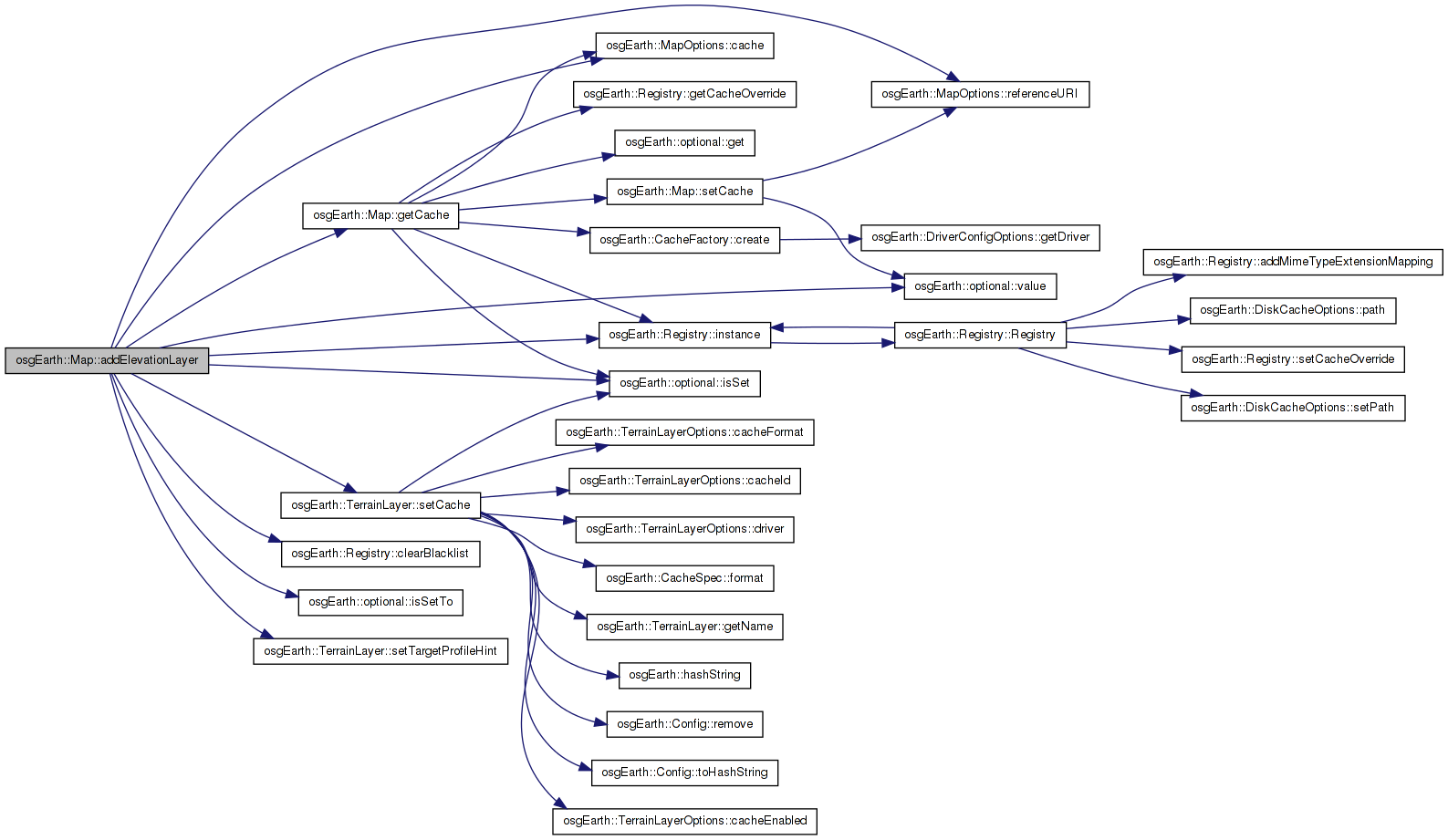
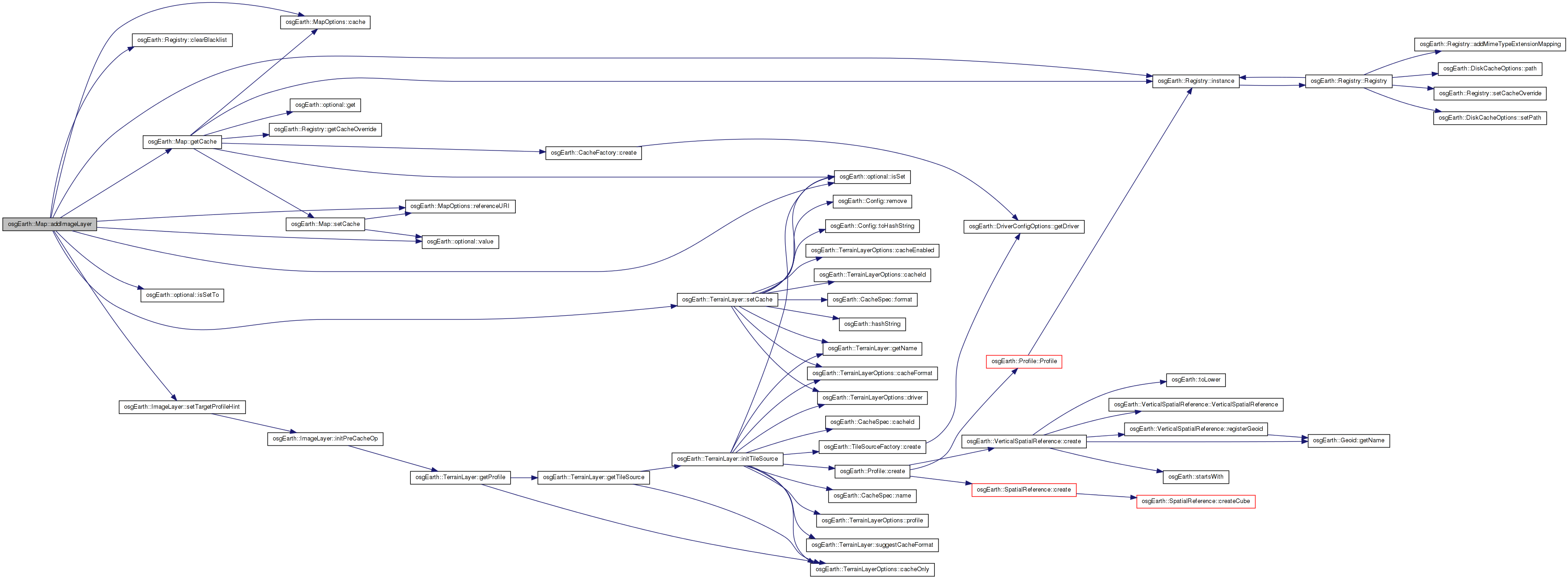
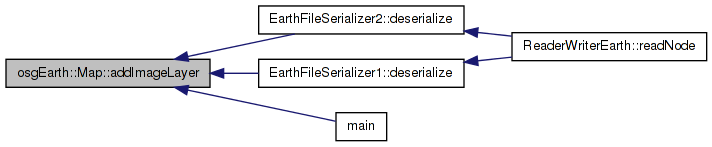
Here is the call graph for this function: Here is the caller graph for this function:| void Map::addImageLayer | ( | ImageLayer * | layer | ) |
Adds an image layer to the map.
Definition at line 338 of file Map.cpp.
{
osgEarth::Registry::instance()->clearBlacklist();
unsigned int index = -1;
if ( layer )
{
//Set options for the map from the layer
layer->setReferenceURI( _mapOptions.referenceURI().value() );
//propagate the cache to the layer:
if ( _mapOptions.cache().isSet() && _mapOptions.cache()->cacheOnly().isSetTo( true ) )
{
layer->setCacheOnly( true );
}
//Set the Cache for the MapLayer to our cache.
layer->setCache( this->getCache() );
// Tell the layer the map profile, if possible:
if ( _profile.valid() )
layer->setTargetProfileHint( _profile.get() );
int newRevision;
// Add the layer to our stack.
{
Threading::ScopedWriteLock lock( _mapDataMutex );
_imageLayers.push_back( layer );
index = _imageLayers.size() - 1;
newRevision = ++_dataModelRevision;
}
// a separate block b/c we don't need the mutex
for( MapCallbackList::iterator i = _mapCallbacks.begin(); i != _mapCallbacks.end(); i++ )
{
i->get()->onMapModelChanged( MapModelChange(
MapModelChange::ADD_IMAGE_LAYER, newRevision, layer, index) );
//i->get()->onImageLayerAdded( layer, index, newRevision );
}
}
}
Here is the call graph for this function: Here is the caller graph for this function:| void Map::addMapCallback | ( | MapCallback * | callback | ) | const |
Adds a map layer callback to this map. This will be notified whenever layers are added, removed, or re-ordered.
Definition at line 321 of file Map.cpp.
{
if ( cb )
const_cast<Map*>(this)->_mapCallbacks.push_back( cb );
}
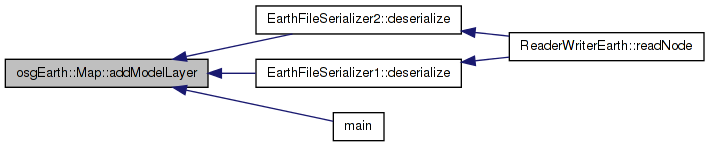
Here is the caller graph for this function:| void Map::addModelLayer | ( | ModelLayer * | layer | ) |
Adds a new model layer to the map.
Definition at line 636 of file Map.cpp.
{
if ( layer )
{
unsigned int index = -1;
Revision newRevision;
{
Threading::ScopedWriteLock lock( _mapDataMutex );
_modelLayers.push_back( layer );
index = _modelLayers.size() - 1;
newRevision = ++_dataModelRevision;
}
layer->initialize( _mapOptions.referenceURI().get(), this ); //getReferenceURI(), this );
// a seprate block b/c we don't need the mutex
for( MapCallbackList::iterator i = _mapCallbacks.begin(); i != _mapCallbacks.end(); i++ )
{
i->get()->onMapModelChanged( MapModelChange(
MapModelChange::ADD_MODEL_LAYER, newRevision, layer, index ) );
}
}
}
Here is the call graph for this function: Here is the caller graph for this function:| void Map::addTerrainMaskLayer | ( | MaskLayer * | layer | ) |
Adds a new layer to use as a terrain mask.
Definition at line 762 of file Map.cpp.
{
if ( layer )
{
Revision newRevision;
{
Threading::ScopedWriteLock lock( _mapDataMutex );
_terrainMaskLayers.push_back(layer);
newRevision = ++_dataModelRevision;
}
layer->initialize( _mapOptions.referenceURI().value(), this );
// a separate block b/c we don't need the mutex
for( MapCallbackList::iterator i = _mapCallbacks.begin(); i != _mapCallbacks.end(); i++ )
{
i->get()->onMapModelChanged( MapModelChange(
MapModelChange::ADD_MASK_LAYER, newRevision, layer) );
}
}
}
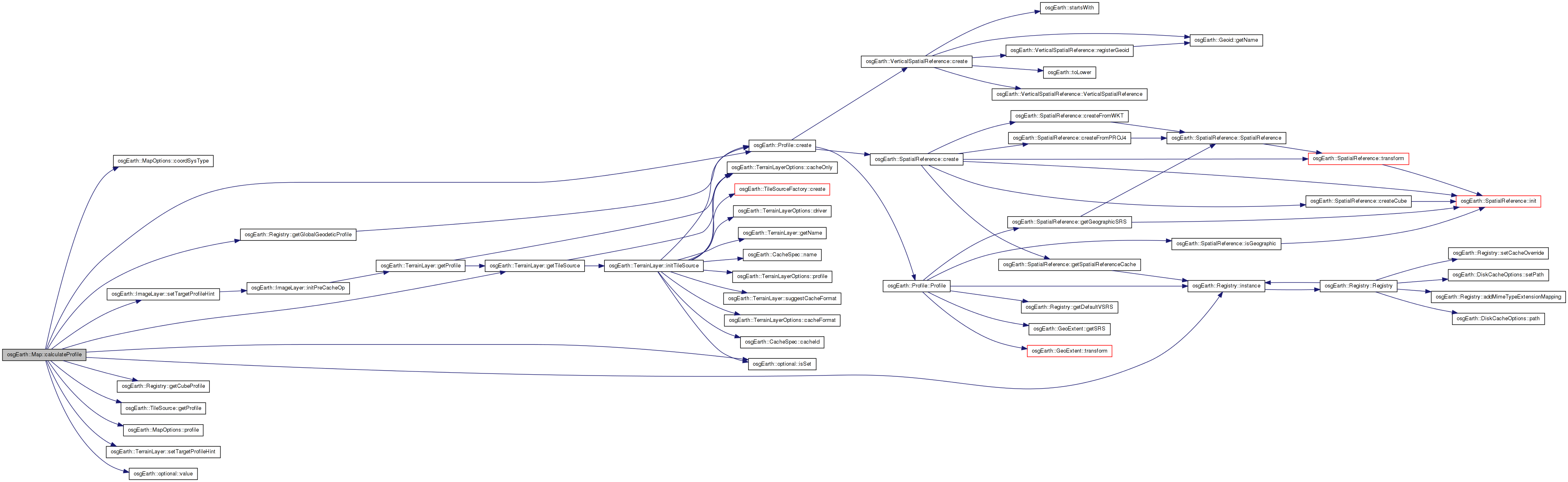
Here is the call graph for this function: Here is the caller graph for this function:| void Map::calculateProfile | ( | ) | [private] |
Definition at line 815 of file Map.cpp.
{
if ( !_profile.valid() )
{
osg::ref_ptr<const Profile> userProfile;
if ( _mapOptions.profile().isSet() )
{
userProfile = Profile::create( _mapOptions.profile().value() );
}
if ( _mapOptions.coordSysType() == MapOptions::CSTYPE_GEOCENTRIC )
{
if ( userProfile.valid() )
{
if ( userProfile->isOK() && userProfile->getSRS()->isGeographic() )
{
_profile = userProfile.get();
}
else
{
OE_WARN << LC
<< "Map is geocentric, but the configured profile does not "
<< "have a geographic SRS. Falling back on default.."
<< std::endl;
}
}
if ( !_profile.valid() )
{
// by default, set a geocentric map to use global-geodetic WGS84.
_profile = osgEarth::Registry::instance()->getGlobalGeodeticProfile();
}
}
else if ( _mapOptions.coordSysType() == MapOptions::CSTYPE_GEOCENTRIC_CUBE )
{
//If the map type is a Geocentric Cube, set the profile to the cube profile.
_profile = osgEarth::Registry::instance()->getCubeProfile();
}
else // CSTYPE_PROJECTED
{
if ( userProfile.valid() )
{
_profile = userProfile.get();
}
}
// At this point, if we don't have a profile we need to search tile sources until we find one.
if ( !_profile.valid() )
{
Threading::ScopedReadLock lock( _mapDataMutex );
for( ImageLayerVector::iterator i = _imageLayers.begin(); i != _imageLayers.end() && !_profile.valid(); i++ )
{
ImageLayer* layer = i->get();
if ( layer->getTileSource() )
{
_profile = layer->getTileSource()->getProfile();
}
}
for( ElevationLayerVector::iterator i = _elevationLayers.begin(); i != _elevationLayers.end() && !_profile.valid(); i++ )
{
ElevationLayer* layer = i->get();
if ( layer->getTileSource() )
{
_profile = layer->getTileSource()->getProfile();
}
}
}
// finally, fire an event if the profile has been set.
if ( _profile.valid() )
{
OE_INFO << LC << "Map profile is: " << _profile->toString() << std::endl;
for( MapCallbackList::iterator i = _mapCallbacks.begin(); i != _mapCallbacks.end(); i++ )
{
i->get()->onMapInfoEstablished( MapInfo(this) );
}
}
else
{
OE_WARN << LC << "Warning, not yet able to establish a map profile!" << std::endl;
}
}
if ( _profile.valid() )
{
// tell all the loaded layers what the profile is, as a hint
{
Threading::ScopedWriteLock lock( _mapDataMutex );
for( ImageLayerVector::iterator i = _imageLayers.begin(); i != _imageLayers.end(); i++ )
{
ImageLayer* layer = i->get();
layer->setTargetProfileHint( _profile.get() );
}
for( ElevationLayerVector::iterator i = _elevationLayers.begin(); i != _elevationLayers.end(); i++ )
{
ElevationLayer* layer = i->get();
layer->setTargetProfileHint( _profile.get() );
}
}
}
}
Here is the call graph for this function:| Cache * Map::getCache | ( | ) | const |
Definition at line 274 of file Map.cpp.
{
if ( !_cache.valid() )
{
Cache* cache = 0L;
// if there's a cache override in the registry, install it now.
if ( osgEarth::Registry::instance()->getCacheOverride() )
{
cache = osgEarth::Registry::instance()->getCacheOverride();
}
else if ( _mapOptions.cache().isSet() )
{
cache = CacheFactory::create( _mapOptions.cache().get() );
}
if ( cache )
{
const_cast<Map*>(this)->setCache( cache );
}
}
return _cache.get();
}
Here is the call graph for this function: Here is the caller graph for this function:| Revision Map::getDataModelRevision | ( | ) | const |
Gets the revision # of the map. The revision # changes every time you add, remove, or move layers. You can use this to track changes in the map model (as a alternative to installing a MapCallback).
Definition at line 259 of file Map.cpp.
{
Threading::ScopedReadLock lock( const_cast<Map*>(this)->_mapDataMutex );
return _dataModelRevision;
}
| ElevationLayer * Map::getElevationLayerAt | ( | int | index | ) | const |
Gets an elevation layer at the specified index.
Definition at line 181 of file Map.cpp.
{
Threading::ScopedReadLock( const_cast<Map*>(this)->_mapDataMutex );
if ( index >= 0 && index < (int)_elevationLayers.size() )
return _elevationLayers[index].get();
else
return 0L;
}
| ElevationLayer * Map::getElevationLayerByName | ( | const std::string & | name | ) | const |
Gets an elevation layer by name.
Definition at line 161 of file Map.cpp.
{
Threading::ScopedReadLock( const_cast<Map*>(this)->_mapDataMutex );
for( ElevationLayerVector::const_iterator i = _elevationLayers.begin(); i != _elevationLayers.end(); ++i )
if ( i->get()->getName() == name )
return i->get();
return 0L;
}
| ElevationLayer * Map::getElevationLayerByUID | ( | UID | layerUID | ) | const |
Gets an elevation layer by its unique ID.
Definition at line 171 of file Map.cpp.
{
Threading::ScopedReadLock( const_cast<Map*>(this)->_mapDataMutex );
for( ElevationLayerVector::const_iterator i = _elevationLayers.begin(); i != _elevationLayers.end(); ++i )
if ( i->get()->getUID() == layerUID )
return i->get();
return 0L;
}
| int Map::getElevationLayers | ( | ElevationLayerVector & | out_layers, |
| bool | validLayersOnly = false |
||
| ) | const |
Copies references of the elevation layers into the output list. This method is thread safe. It returns the map revision that was in effect when the data was copied.
Definition at line 141 of file Map.cpp.
{
out_list.reserve( _elevationLayers.size() );
Threading::ScopedReadLock lock( const_cast<Map*>(this)->_mapDataMutex );
for( ElevationLayerVector::const_iterator i = _elevationLayers.begin(); i != _elevationLayers.end(); ++i )
if ( !validLayersOnly || i->get()->getProfile() )
out_list.push_back( i->get() );
return _dataModelRevision;
}
Here is the caller graph for this function:| const osgDB::ReaderWriter::Options * Map::getGlobalOptions | ( | ) | const |
Gets the user-provided options structure stored in this map.
Definition at line 81 of file Map.cpp.
{
return _globalOptions.get();
}
| bool Map::getHeightField | ( | const TileKey & | key, |
| bool | fallback, | ||
| osg::ref_ptr< osg::HeightField > & | out_hf, | ||
| bool * | out_isFallback = 0L, |
||
| ElevationInterpolation | interpolation = INTERP_AVERAGE, |
||
| ElevationSamplePolicy | samplePolicy = SAMPLE_FIRST_VALID, |
||
| ProgressCallback * | progress = 0 |
||
| ) | const |
Creates a heightfield for the region covered by the given TileKey, falling back on lower resolutions if necessary.
| key | Tile key defining the region (and ideal LOD) for which to return a heightfield |
| samplePolicy | See enum SamplePolicy in this class. |
Definition at line 1150 of file Map.cpp.
{
Threading::ScopedReadLock lock( const_cast<Map*>(this)->_mapDataMutex );
return s_getHeightField(
key, _elevationLayers, getProfile(), fallback,
interpolation, samplePolicy,
out_result, out_isFallback,
progress );
}
Here is the call graph for this function:| ImageLayer * Map::getImageLayerAt | ( | int | index | ) | const |
Gets an image layer at the specified index.
Definition at line 131 of file Map.cpp.
{
Threading::ScopedReadLock( const_cast<Map*>(this)->_mapDataMutex );
if ( index >= 0 && index < (int)_imageLayers.size() )
return _imageLayers[index].get();
else
return 0L;
}
| ImageLayer * Map::getImageLayerByName | ( | const std::string & | name | ) | const |
Gets an image layer by name.
Definition at line 111 of file Map.cpp.
{
Threading::ScopedReadLock( const_cast<Map*>(this)->_mapDataMutex );
for( ImageLayerVector::const_iterator i = _imageLayers.begin(); i != _imageLayers.end(); ++i )
if ( i->get()->getName() == name )
return i->get();
return 0L;
}
| ImageLayer * Map::getImageLayerByUID | ( | UID | layerUID | ) | const |
Gets an image layer by its unique ID.
Definition at line 121 of file Map.cpp.
{
Threading::ScopedReadLock( const_cast<Map*>(this)->_mapDataMutex );
for( ImageLayerVector::const_iterator i = _imageLayers.begin(); i != _imageLayers.end(); ++i )
if ( i->get()->getUID() == layerUID )
return i->get();
return 0L;
}
| int Map::getImageLayers | ( | ImageLayerVector & | out_layers, |
| bool | validLayersOnly = false |
||
| ) | const |
Copies references of the map image layers into the output list. This method is thread safe. It returns the map revision that was in effect when the data was copied.
Definition at line 91 of file Map.cpp.
{
out_list.reserve( _imageLayers.size() );
Threading::ScopedReadLock lock( const_cast<Map*>(this)->_mapDataMutex );
for( ImageLayerVector::const_iterator i = _imageLayers.begin(); i != _imageLayers.end(); ++i )
if ( !validLayersOnly || i->get()->getProfile() )
out_list.push_back( i->get() );
return _dataModelRevision;
}
Here is the caller graph for this function:| const MapOptions& osgEarth::Map::getMapOptions | ( | ) | const [inline] |
Gets the optons with which this map was created.
Definition at line 124 of file Map.
{ return _mapOptions; }
Here is the caller graph for this function:| ModelLayer * Map::getModelLayerAt | ( | int | index | ) | const |
Gets the model layer at the specified index.
Definition at line 225 of file Map.cpp.
{
Threading::ScopedReadLock( const_cast<Map*>(this)->_mapDataMutex );
if ( index >= 0 && index < (int)_modelLayers.size() )
return _modelLayers[index].get();
else
return 0L;
}
| ModelLayer * Map::getModelLayerByName | ( | const std::string & | name | ) | const |
Gets a model layer by name.
Definition at line 204 of file Map.cpp.
{
Threading::ScopedReadLock( const_cast<Map*>(this)->_mapDataMutex );
for( ModelLayerVector::const_iterator i = _modelLayers.begin(); i != _modelLayers.end(); ++i )
if ( i->get()->getName() == name )
return i->get();
return 0L;
}
| ModelLayer * Map::getModelLayerByUID | ( | UID | layerUID | ) | const |
Gets a model layer by its unique ID.
Definition at line 214 of file Map.cpp.
{
Threading::ScopedReadLock( const_cast<Map*>(this)->_mapDataMutex );
for( ModelLayerVector::const_iterator i = _modelLayers.begin(); i != _modelLayers.end(); ++i )
if ( i->get()->getUID() == layerUID )
return i->get();
return 0L;
}
| int Map::getModelLayers | ( | ModelLayerVector & | out_layers, |
| bool | validLayersOnly = false |
||
| ) | const |
Copies references of the model layers into the output list. This method is thread safe. It returns the map revision that was in effect when the data was copied.
Definition at line 191 of file Map.cpp.
{
out_list.reserve( _modelLayers.size() );
Threading::ScopedReadLock lock( const_cast<Map*>(this)->_mapDataMutex );
for( ModelLayerVector::const_iterator i = _modelLayers.begin(); i != _modelLayers.end(); ++i )
//if ( !validLayersOnly || i->get()->i->get()->getProfile() )
out_list.push_back( i->get() );
return _dataModelRevision;
}
| const std::string& osgEarth::Map::getName | ( | ) | const [inline] |
| int Map::getNumElevationLayers | ( | ) | const |
Gets the number of elevation layers in the map.
Definition at line 154 of file Map.cpp.
{
Threading::ScopedReadLock lock( const_cast<Map*>(this)->_mapDataMutex );
return _elevationLayers.size();
}
| int Map::getNumImageLayers | ( | ) | const |
Gets the number of image layers in the map.
Definition at line 104 of file Map.cpp.
{
Threading::ScopedReadLock lock( const_cast<Map*>(this)->_mapDataMutex );
return _imageLayers.size();
}
| int Map::getNumModelLayers | ( | ) | const |
Gets the number of model layers in the map.
Definition at line 235 of file Map.cpp.
{
Threading::ScopedReadLock lock( const_cast<Map*>(this)->_mapDataMutex );
return _modelLayers.size();
}
| const Profile * Map::getProfile | ( | ) | const |
| int Map::getTerrainMaskLayers | ( | MaskLayerVector & | out_list | ) | const |
Copies references of the mask layers into the output list. This method is thread safe. It returns the map revision that was in effect when the data was copied.
Definition at line 242 of file Map.cpp.
{
out_list.reserve( _terrainMaskLayers.size() );
Threading::ScopedReadLock lock( const_cast<Map*>(this)->_mapDataMutex );
for( MaskLayerVector::const_iterator i = _terrainMaskLayers.begin(); i != _terrainMaskLayers.end(); ++i )
out_list.push_back( i->get() );
return _dataModelRevision;
}
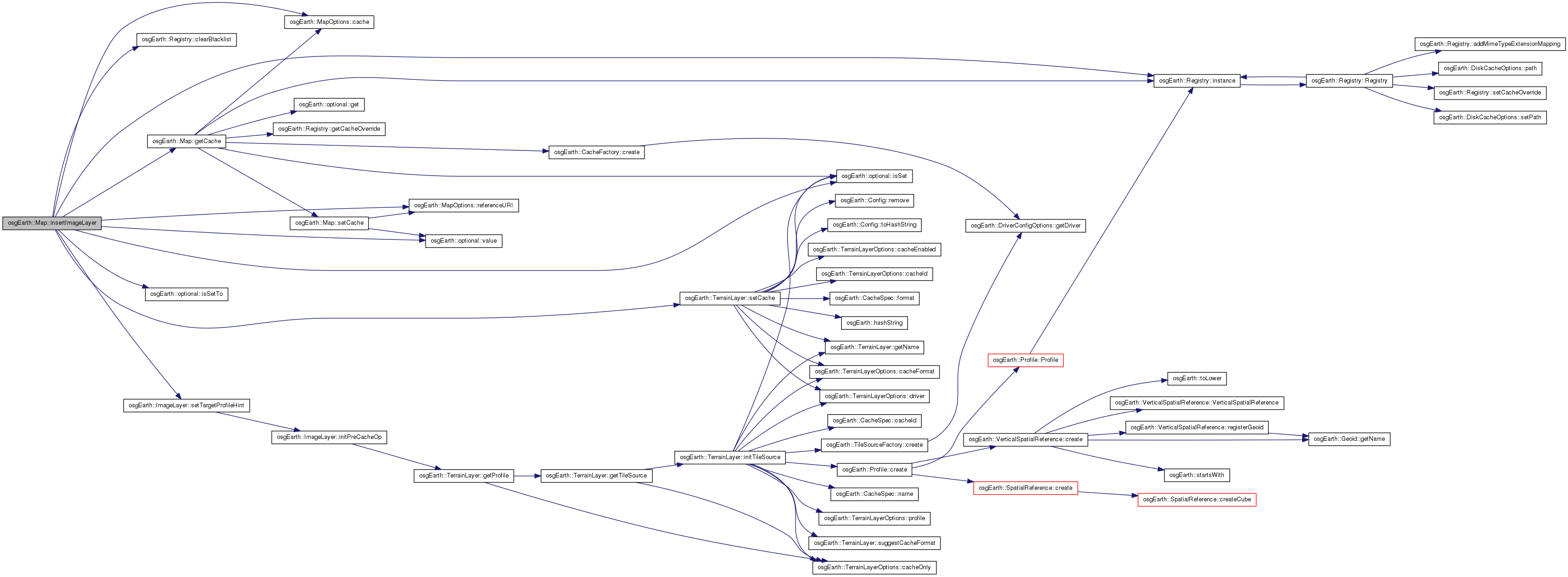
| void Map::insertImageLayer | ( | ImageLayer * | layer, |
| unsigned int | index | ||
| ) |
Adds an image layer to the map at the specified index.
Definition at line 383 of file Map.cpp.
{
osgEarth::Registry::instance()->clearBlacklist();
if ( layer )
{
//Set options for the map from the layer
layer->setReferenceURI( _mapOptions.referenceURI().value() );
//propagate the cache to the layer:
if ( _mapOptions.cache().isSet() && _mapOptions.cache()->cacheOnly().isSetTo( true ) )
{
layer->setCacheOnly( true );
}
//Set the Cache for the MapLayer to our cache.
layer->setCache( this->getCache() );
// Tell the layer the map profile, if possible:
if ( _profile.valid() )
layer->setTargetProfileHint( _profile.get() );
int newRevision;
// Add the layer to our stack.
{
Threading::ScopedWriteLock lock( _mapDataMutex );
if (index >= _imageLayers.size())
_imageLayers.push_back(layer);
else
_imageLayers.insert( _imageLayers.begin() + index, layer );
newRevision = ++_dataModelRevision;
}
// a separate block b/c we don't need the mutex
for( MapCallbackList::iterator i = _mapCallbacks.begin(); i != _mapCallbacks.end(); i++ )
{
i->get()->onMapModelChanged( MapModelChange(
MapModelChange::ADD_IMAGE_LAYER, newRevision, layer, index) );
}
}
}
Here is the call graph for this function:| void Map::insertModelLayer | ( | ModelLayer * | layer, |
| unsigned int | index | ||
| ) |
Adds a new model layer to the map at the specified index.
Definition at line 662 of file Map.cpp.
{
if ( layer )
{
Revision newRevision;
{
Threading::ScopedWriteLock lock( _mapDataMutex );
_modelLayers.insert( _modelLayers.begin() + index, layer );
newRevision = ++_dataModelRevision;
}
layer->initialize( _mapOptions.referenceURI().get(), this ); //getReferenceURI(), this );
// a seprate block b/c we don't need the mutex
for( MapCallbackList::iterator i = _mapCallbacks.begin(); i != _mapCallbacks.end(); i++ )
{
i->get()->onMapModelChanged( MapModelChange(
MapModelChange::ADD_MODEL_LAYER, newRevision, layer, index) );
}
}
}
Here is the call graph for this function:| bool Map::isGeocentric | ( | ) | const |
Convenience function that returns TRUE if the map cs type is geocentric.
Definition at line 73 of file Map.cpp.
{
return
_mapOptions.coordSysType() == MapOptions::CSTYPE_GEOCENTRIC ||
_mapOptions.coordSysType() == MapOptions::CSTYPE_GEOCENTRIC_CUBE;
}
Here is the call graph for this function: Here is the caller graph for this function:| bool Map::mapPointToWorldPoint | ( | const osg::Vec3d & | input, |
| osg::Vec3d & | output | ||
| ) | const |
Convenience function to convert a point (in map coordinates) to world-space (XYZ) coordinates.
Definition at line 1239 of file Map.cpp.
{
return MapInfo(this).mapPointToWorldPoint(input, output);
}
Here is the call graph for this function:| void Map::moveElevationLayer | ( | ElevationLayer * | layer, |
| unsigned int | newIndex | ||
| ) |
Moves (re-orders) an elevation layer to another index position in its list.
Definition at line 589 of file Map.cpp.
{
unsigned int oldIndex = 0;
unsigned int actualIndex = 0;
Revision newRevision;
if ( layer )
{
Threading::ScopedWriteLock lock( _mapDataMutex );
// preserve the layer with a ref:
osg::ref_ptr<ElevationLayer> layerToMove = layer;
// find it:
ElevationLayerVector::iterator i_oldIndex = _elevationLayers.end();
for( ElevationLayerVector::iterator i = _elevationLayers.begin(); i != _elevationLayers.end(); i++, actualIndex++ )
{
if ( i->get() == layer )
{
i_oldIndex = i;
oldIndex = actualIndex;
break;
}
}
if ( i_oldIndex == _elevationLayers.end() )
return; // layer not found in list
// erase the old one and insert the new one.
_elevationLayers.erase( i_oldIndex );
_elevationLayers.insert( _elevationLayers.begin() + newIndex, layerToMove.get() );
newRevision = ++_dataModelRevision;
}
// a separate block b/c we don't need the mutex
if ( layer )
{
for( MapCallbackList::iterator i = _mapCallbacks.begin(); i != _mapCallbacks.end(); i++ )
{
i->get()->onMapModelChanged( MapModelChange(
MapModelChange::MOVE_ELEVATION_LAYER, newRevision, layer, oldIndex, newIndex) );
}
}
}
| void Map::moveImageLayer | ( | ImageLayer * | layer, |
| unsigned int | newIndex | ||
| ) |
Moves (re-orders) an image layer to another index position in its list.
Definition at line 542 of file Map.cpp.
{
unsigned int oldIndex = 0;
unsigned int actualIndex = 0;
Revision newRevision;
if ( layer )
{
Threading::ScopedWriteLock lock( _mapDataMutex );
// preserve the layer with a ref:
osg::ref_ptr<ImageLayer> layerToMove = layer;
// find it:
ImageLayerVector::iterator i_oldIndex = _imageLayers.end();
for( ImageLayerVector::iterator i = _imageLayers.begin(); i != _imageLayers.end(); i++, actualIndex++ )
{
if ( i->get() == layer )
{
i_oldIndex = i;
oldIndex = actualIndex;
break;
}
}
if ( i_oldIndex == _imageLayers.end() )
return; // layer not found in list
// erase the old one and insert the new one.
_imageLayers.erase( i_oldIndex );
_imageLayers.insert( _imageLayers.begin() + newIndex, layerToMove.get() );
newRevision = ++_dataModelRevision;
}
// a separate block b/c we don't need the mutex
if ( layer )
{
for( MapCallbackList::iterator i = _mapCallbacks.begin(); i != _mapCallbacks.end(); i++ )
{
i->get()->onMapModelChanged( MapModelChange(
MapModelChange::MOVE_IMAGE_LAYER, newRevision, layer, oldIndex, newIndex) );
}
}
}
| void Map::moveModelLayer | ( | ModelLayer * | layer, |
| unsigned int | newIndex | ||
| ) |
Moves (re-orders) an image layer to another index position in its list.
Definition at line 715 of file Map.cpp.
{
unsigned int oldIndex = 0;
unsigned int actualIndex = 0;
Revision newRevision;
if ( layer )
{
Threading::ScopedWriteLock lock( _mapDataMutex );
// preserve the layer with a ref:
osg::ref_ptr<ModelLayer> layerToMove = layer;
// find it:
ModelLayerVector::iterator i_oldIndex = _modelLayers.end();
for( ModelLayerVector::iterator i = _modelLayers.begin(); i != _modelLayers.end(); i++, actualIndex++ )
{
if ( i->get() == layer )
{
i_oldIndex = i;
oldIndex = actualIndex;
break;
}
}
if ( i_oldIndex == _modelLayers.end() )
return; // layer not found in list
// erase the old one and insert the new one.
_modelLayers.erase( i_oldIndex );
_modelLayers.insert( _modelLayers.begin() + newIndex, layerToMove.get() );
newRevision = ++_dataModelRevision;
}
// a separate block b/c we don't need the mutex
if ( layer )
{
for( MapCallbackList::iterator i = _mapCallbacks.begin(); i != _mapCallbacks.end(); i++ )
{
i->get()->onMapModelChanged( MapModelChange(
MapModelChange::MOVE_MODEL_LAYER, newRevision, layer, oldIndex, newIndex) );
}
}
}
| void Map::removeElevationLayer | ( | ElevationLayer * | layer | ) |
Removes an elevation layer from the map.
Definition at line 507 of file Map.cpp.
{
osgEarth::Registry::instance()->clearBlacklist();
unsigned int index = -1;
osg::ref_ptr<ElevationLayer> layerToRemove = layer;
Revision newRevision;
if ( layerToRemove.get() )
{
Threading::ScopedWriteLock lock( _mapDataMutex );
index = 0;
for( ElevationLayerVector::iterator i = _elevationLayers.begin(); i != _elevationLayers.end(); i++, index++ )
{
if ( i->get() == layerToRemove.get() )
{
_elevationLayers.erase( i );
newRevision = ++_dataModelRevision;
break;
}
}
}
// a separate block b/c we don't need the mutex
if ( newRevision >= 0 ) //layerToRemove.get() )
{
for( MapCallbackList::iterator i = _mapCallbacks.begin(); i != _mapCallbacks.end(); i++ )
{
i->get()->onMapModelChanged( MapModelChange(
MapModelChange::REMOVE_ELEVATION_LAYER, newRevision, layerToRemove.get(), index) );
}
}
}
Here is the call graph for this function:| void Map::removeImageLayer | ( | ImageLayer * | layer | ) |
Removes an image layer from the map.
Definition at line 471 of file Map.cpp.
{
osgEarth::Registry::instance()->clearBlacklist();
unsigned int index = -1;
osg::ref_ptr<ImageLayer> layerToRemove = layer;
Revision newRevision;
if ( layerToRemove.get() )
{
Threading::ScopedWriteLock lock( _mapDataMutex );
index = 0;
for( ImageLayerVector::iterator i = _imageLayers.begin(); i != _imageLayers.end(); i++, index++ )
{
if ( i->get() == layerToRemove.get() )
{
_imageLayers.erase( i );
newRevision = ++_dataModelRevision;
break;
}
}
}
// a separate block b/c we don't need the mutex
if ( newRevision >= 0 ) // layerToRemove.get() )
{
for( MapCallbackList::iterator i = _mapCallbacks.begin(); i != _mapCallbacks.end(); i++ )
{
i->get()->onMapModelChanged( MapModelChange(
MapModelChange::REMOVE_IMAGE_LAYER, newRevision, layerToRemove.get(), index) );
//i->get()->onImageLayerRemoved( layerToRemove.get(), index, newRevision );
}
}
}
Here is the call graph for this function:| void Map::removeMapCallback | ( | MapCallback * | callback | ) |
Definition at line 328 of file Map.cpp.
{
MapCallbackList::iterator i = std::find( _mapCallbacks.begin(), _mapCallbacks.end(), cb);
if (i != _mapCallbacks.end())
{
_mapCallbacks.erase( i );
}
}
| void Map::removeModelLayer | ( | ModelLayer * | layer | ) |
Removes a model layer from the map.
Definition at line 685 of file Map.cpp.
{
if ( layer )
{
//Take a reference to the layer since we will be deleting it
osg::ref_ptr< ModelLayer > layerRef = layer;
Revision newRevision;
{
Threading::ScopedWriteLock lock( _mapDataMutex );
for( ModelLayerVector::iterator i = _modelLayers.begin(); i != _modelLayers.end(); ++i )
{
if ( i->get() == layer )
{
_modelLayers.erase( i );
newRevision = ++_dataModelRevision;
break;
}
}
}
for( MapCallbackList::iterator i = _mapCallbacks.begin(); i != _mapCallbacks.end(); ++i )
{
i->get()->onMapModelChanged( MapModelChange(
MapModelChange::REMOVE_MODEL_LAYER, newRevision, layerRef.get()) );
}
}
}
| void Map::removeTerrainMaskLayer | ( | MaskLayer * | layer | ) |
Removed a terrain mask layer that was set with setTerrainMaskLayer().
Definition at line 785 of file Map.cpp.
{
if ( layer )
{
//Take a reference to the layer since we will be deleting it
osg::ref_ptr< MaskLayer > layerRef = layer;
Revision newRevision;
{
Threading::ScopedWriteLock lock( _mapDataMutex );
for( MaskLayerVector::iterator i = _terrainMaskLayers.begin(); i != _terrainMaskLayers.end(); ++i )
{
if ( i->get() == layer )
{
_terrainMaskLayers.erase( i );
newRevision = ++_dataModelRevision;
break;
}
}
}
// a separate block b/c we don't need the mutex
for( MapCallbackList::iterator i = _mapCallbacks.begin(); i != _mapCallbacks.end(); i++ )
{
i->get()->onMapModelChanged( MapModelChange(
MapModelChange::REMOVE_MASK_LAYER, newRevision, layerRef.get()) );
}
}
}
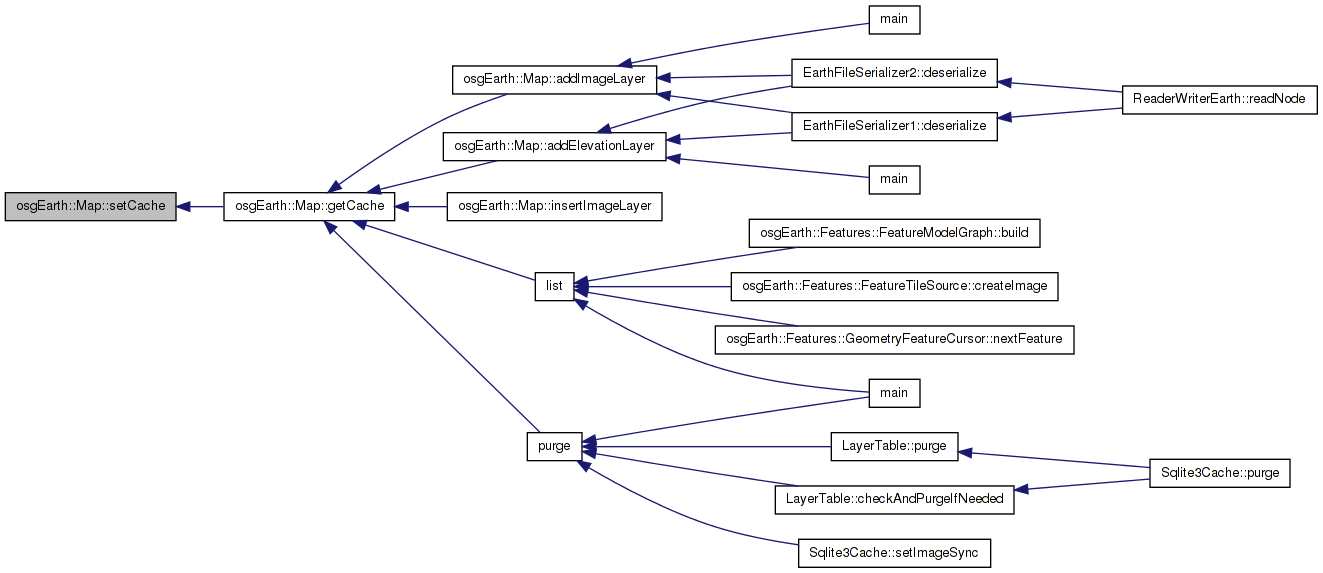
| void Map::setCache | ( | Cache * | cache | ) |
Sets the Cache for this Map. Set to NULL for no cache.
Definition at line 300 of file Map.cpp.
{
if (_cache.get() != cache)
{
_cache = cache;
_cache->setReferenceURI( _mapOptions.referenceURI().value() );
//Propagate the cache to any of our layers
for (ImageLayerVector::iterator i = _imageLayers.begin(); i != _imageLayers.end(); ++i)
{
i->get()->setCache( _cache.get() );
}
for (ElevationLayerVector::iterator i = _elevationLayers.begin(); i != _elevationLayers.end(); ++i)
{
i->get()->setCache( _cache.get() );
}
}
}
Here is the call graph for this function: Here is the caller graph for this function:| void Map::setGlobalOptions | ( | const osgDB::ReaderWriter::Options * | options | ) |
Definition at line 86 of file Map.cpp.
{
_globalOptions = options;
}
| void Map::setName | ( | const std::string & | name | ) |
| bool Map::sync | ( | class MapFrame & | frame | ) | const |
Synronizes a map frame to the current revision of the map's data model. Returns true if new Map model data was available and a sync occurred; returns false if nothing changed.
Definition at line 1168 of file Map.cpp.
{
bool result = false;
if ( frame._mapDataModelRevision != _dataModelRevision || !frame._initialized )
{
// hold the read lock while copying the layer lists.
Threading::ScopedReadLock lock( const_cast<Map*>(this)->_mapDataMutex );
if ( frame._parts & IMAGE_LAYERS )
{
if ( !frame._initialized )
frame._imageLayers.reserve( _imageLayers.size() );
frame._imageLayers.clear();
if ( frame._copyValidDataOnly )
{
for( ImageLayerVector::const_iterator i = _imageLayers.begin(); i != _imageLayers.end(); ++i )
if ( i->get()->getProfile() )
frame._imageLayers.push_back( i->get() );
}
else
std::copy( _imageLayers.begin(), _imageLayers.end(), std::back_inserter(frame._imageLayers) );
}
if ( frame._parts & ELEVATION_LAYERS )
{
if ( !frame._initialized )
frame._elevationLayers.reserve( _elevationLayers.size() );
frame._elevationLayers.clear();
if ( frame._copyValidDataOnly )
{
for( ElevationLayerVector::const_iterator i = _elevationLayers.begin(); i != _elevationLayers.end(); ++i )
if ( i->get()->getProfile() )
frame._elevationLayers.push_back( i->get() );
}
else
std::copy( _elevationLayers.begin(), _elevationLayers.end(), std::back_inserter(frame._elevationLayers) );
}
if ( frame._parts & MODEL_LAYERS )
{
if ( !frame._initialized )
frame._modelLayers.reserve( _modelLayers.size() );
frame._modelLayers.clear();
std::copy( _modelLayers.begin(), _modelLayers.end(), std::back_inserter(frame._modelLayers) );
}
if ( frame._parts & MASK_LAYERS )
{
if ( !frame._initialized )
frame._maskLayers.reserve( _terrainMaskLayers.size() );
frame._maskLayers.clear();
std::copy( _terrainMaskLayers.begin(), _terrainMaskLayers.end(), std::back_inserter(frame._maskLayers) );
}
// sync the revision numbers.
frame._initialized = true;
frame._mapDataModelRevision = _dataModelRevision;
result = true;
}
return result;
}
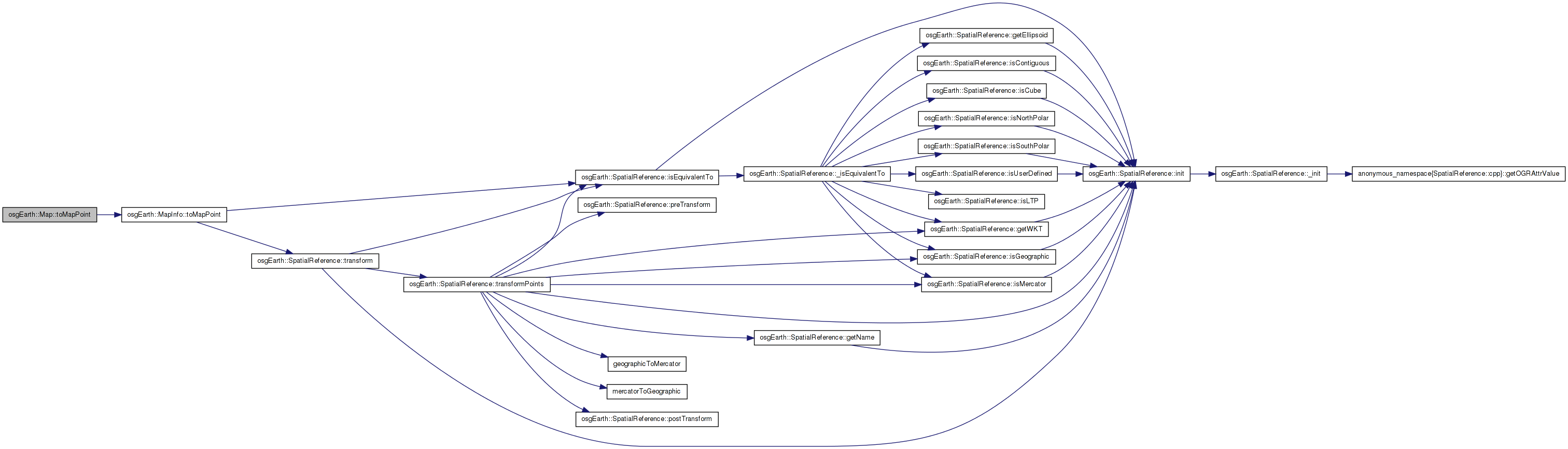
Here is the call graph for this function:| bool Map::toMapPoint | ( | const osg::Vec3d & | input, |
| const SpatialReference * | input_srs, | ||
| osg::Vec3d & | output | ||
| ) | const |
Convenience function to convert an arbitrary point to map coordinates.
Definition at line 1233 of file Map.cpp.
{
return MapInfo(this).toMapPoint(input, inputSRS, output);
}
Here is the call graph for this function:| bool Map::worldPointToMapPoint | ( | const osg::Vec3d & | input, |
| osg::Vec3d & | output | ||
| ) | const |
Convenience function to convert a world-space (XYZ) point to map coordinates.
Definition at line 1245 of file Map.cpp.
{
return MapInfo(this).worldPointToMapPoint(input, output);
}
Here is the call graph for this function:osg::ref_ptr<Cache> osgEarth::Map::_cache [private] |
Revision osgEarth::Map::_dataModelRevision [private] |
osg::ref_ptr<const osgDB::ReaderWriter::Options> osgEarth::Map::_globalOptions [private] |
ImageLayerVector osgEarth::Map::_imageLayers [private] |
MapCallbackList osgEarth::Map::_mapCallbacks [private] |
MapOptions osgEarth::Map::_mapOptions [private] |
ModelLayerVector osgEarth::Map::_modelLayers [private] |
std::string osgEarth::Map::_name [private] |
osg::ref_ptr<const Profile> osgEarth::Map::_profile [private] |
 1.7.3
1.7.3